La vérité terrain, un support pour qualifier les expériences en mer,

Toute l’année nous travaillons sur la conception de nouveaux robots marins et sous-marins vers de nouvelles applications. Nous réfléchissons à de nouveaux designs de systèmes : comment se déplacer et s’équilibrer (combien de propulseurs, de balastes ou de turbines ? où les positionner ? sont il fixes ou orientables ?), comment limiter les dépenses énergetiques ou l’impact environemental, comment se localiser, comment restituer les scènes visiter les reconstruire, comment surveiller des installations offshore, vérifier l’intégriter de coques de bateaux, surveiller un éco-système ? Ces travaux sont à l’intersection des communautés de la robotique et de la vision par ordinateur, de la commande et de la photogrammétrie.
Les expérimentations en mer nous permettent de tester nos méthodes dans des conditions réélles. Elles nous confrontent au vent, aux vagues, au courant que nous avons du mal à bien simuler en laboratoire. Mais aussi a des objets mobiles non modélisés et inattendus, comme les mérous ! Cela nous permet de valider la robustesse de nos systèmes et leur pertinence face à une application de terrain. C’est la dernière étape de validation de nos systèmes.
Mais, contrairement aux essais en bassin, ou de grands hublots nous permettent de surveiller et mesurer les déplacements des sous-marins, en mer, dès que notre robot plonge sous la surface, nous n’avons plus de vue directe sur lui. En bassin, nous fixons des systèmes de mesure aux parois, mais en mer, on ne peut pas installer de motion capture… En bassin, on connait les dimensions, les objets posés au fond, on contrôle les situations, et on peut donc évaluer la précision de nos reconstructions. En mer, il faut trouver d’autres solutions.
C’est tout l’objet de la semaine expérimental du Submeeting : offrir des espaces d’expérimentation en milieu ouvert avec des outils d’évaluation et de mesure des performance des systèmes.
Sur les aspects, reconstruction 3D et photogrammétrie. Toutes les équipes présentes vont effectuer des relévés sur les mêmes sites durant toute la semain. Ces données par elles même sont déjà une source de comparaison des méthodes. En plus de ces données comparatives, nous proposons trois éléments de « vérité terrain » : la mise en place de réseaux géodésiques, des relevés locaux photogrammétriques, un relevé bathymétriques. Cette collecte de données est destinée à être publiée et rendue accessibles aux communautés de la robotique et de la vision par ordinateur pour qu’ils puissent développer de nouvelles méthodes hors ligne, et qui sait, se préparer à nous rejoindre pour les prochaines éditions ?
Micro réseau géodésique
Des points de repères seront déposés sur les fonds marins pour vérifier la qualité des reconstructions 3D. Les distances les séparant sont mesurées par des plongeurs scaphandriers et servent à trianguler leur position en 3D, produisant un maillage de référence, tout comme un géomètre le ferait sur terre.
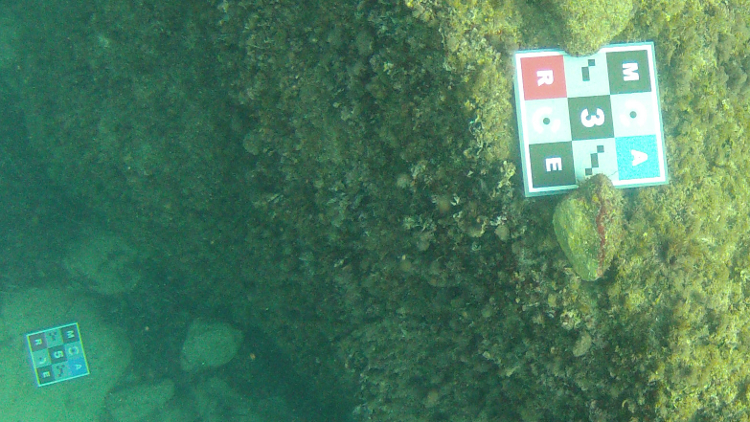

4 réseaux de plaques ont été déposés en 2022 sur quatre sites de 10mx10m environ : la base d’une amarre, un canyon, les environs d’une statue immergée et la tête d’une roche. Ces marqueurs sont déposés durant toute la semaine et retirées ensuite.


Loïca Avanthey and Laurent Beaudoin (Dr., SEAL, LRE, EPITA, France)
« Micro-Geodesic Ground truth networks and datasets. Feedback on the 2022 Edition. »
(Cliquez sur l’image pour voir la présentation)
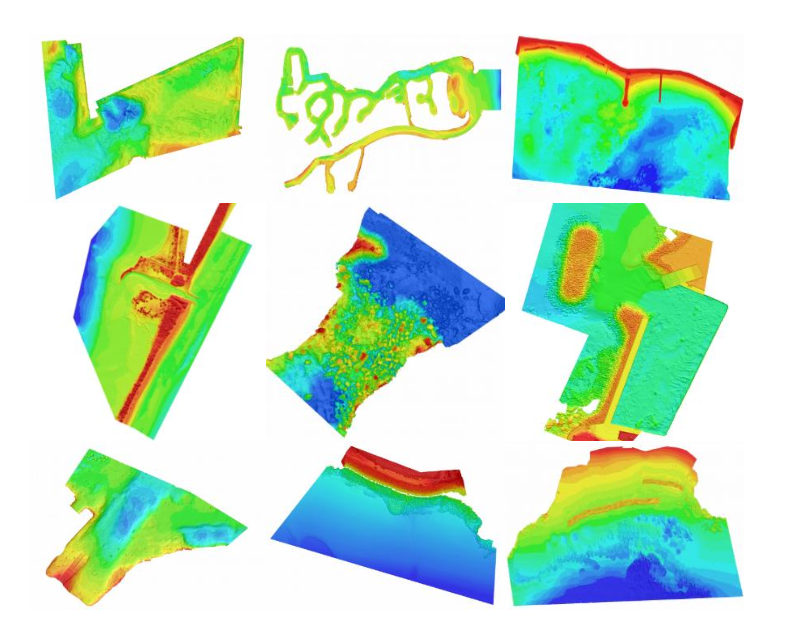
Relevé Bathymétrique
SEMANTIC TS
Fondée en 1993, SEMANTIC TS est spécialisée dans la reconnaissance acoustique des fonds marins, les mesures, la réalisation de logiciels dédiés, les systèmes d’informations géographiques, le traitement du signal, et le data science. Elle présente un fort potentiel d’innovation dans la définition et la conduite de méthodes de reconnaissance acoustique et la fusion multi-capteurs. SEMANTIC TS dispose d’ingénieurs, de plongeurs et de pilotes professionnels et ses navires prennent quotidiennement la mer pour la réalisation de cartographies des petits fonds marins.
Grâce aux levers effectués (sous-marins, terrestres, aériens) nous réalisons des cartographies et des modélisations géo-référencées précises et résolvantes, permettant le suivi environnemental des zones côtières.